
{kind=link}
This map shows the path to the SSE (yellow line) that took Curiosity out of the shallow depression that the team called “Thumb”. The rover is now parked on one of the erosion resistant ridges in between 2 of the depressions that a common in this boxwork terrain. There appears to be some nice bedrock in reach of the rover’s robotic arm in case the team spot a suitable target for further investigations.
The workspace mosaic was assembled out of 15 de-Bayered overlapping L-MastCam images using MS-ICE

My version of the drive data. I hope SpecialSetofSieves posts his version as it contains additional data mine does not, and it’s also more concise :)
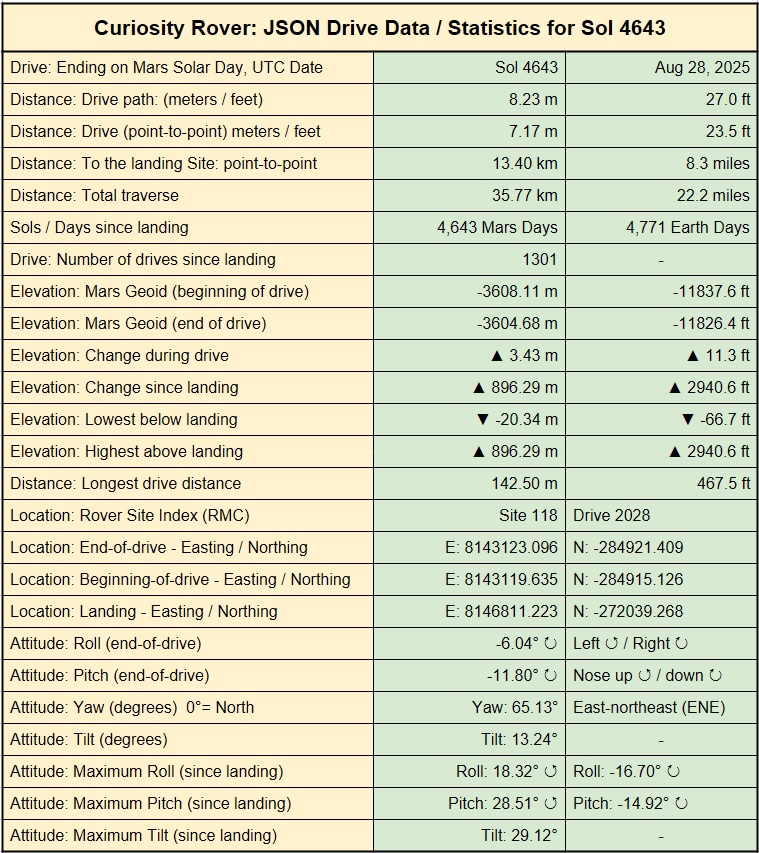
Best I can do at the moment:

Best I can do at the moment:
Works for me :)
PS: I believe I have found the way they calculate drive duration (it’s hidden in the image json) :)